近期,哈尔滨工业大学深圳校区赵毅教授与其博士生王一峰带领研究团队首次实现了基于单个惯性传感器的运动追踪与空间轨迹重建,并在IEEE Sensors Journal上发表了题为《Arbitrary Spatial Trajectory Reconstruction based on A Single Inertial Sensor》的学术论文。哈工大深圳校区数学系博士生王一峰为第一作者,赵毅教授为通讯作者,哈工大深圳为第一作者单位和通讯单位。
基于惯性传感器的运动追踪技术在航空航天、虚拟现实、人机交互、无人驾驶等领域具有广泛的应用价值。然而,受制于惯性传感器精度,3D运动轨迹还原的技术难度很高,目前学界仍未能突破基于单个惯性传感器的任意轨迹重建技术。一些研究试图借助深度学习模型对运动轨迹进行预测,然而三维运动轨迹具有大量的待预测参数,有限的训练样本与海量的待预测参数相比杯水车薪。为此,研究团队建立了一种流形深度学习方案,该方案通过几何模型库实现对高维轨迹流形的低维表示,从而降低深度学习方法的学习成本,最终实现基于单个惯性传感器的任意运动追踪与轨迹重建。
此外,王一峰、赵毅等人提出了一种分布式监督学习框架。该框架可以将一个预测任务分解为多个相对简单的预测子任务,并将其耦合在一个深度学习框架内,不同的子任务共享特征提取器,从而实现对输入信息的深度挖掘。此外,分布式监督学习方法鼓励不同子任务预测模块在训练中发掘自身优势,避免多个子任务之间的同质化竞争,从而提升每个子任务的预测精度,最终实现整个深度学习框架预测精度的大幅提升。

算法流程图
在该项研究中,NOKOV度量光学动作捕捉系统为深度学习模型的训练提供了精准的标签,在北京度量科技有限公司多位工程师与技术人员的配合下,项目研究团队成功建立了全国首个惯性运动追踪数据集(Inertial Motion Tracking Dataset, IMTD),该数据集可广泛应用于无卫星导航、无人驾驶、可穿戴设备等领域的人工智能模型训练。基于IMTD数据集,王一峰,赵毅等人提出的运动追踪方法突破了传统的惯性、光学、GPS、载波相位等运动追踪与定位技术的局限,为可穿戴设备、人机交互、航空航天等领域提供了新的技术方案,具有广阔的市场应用前景。

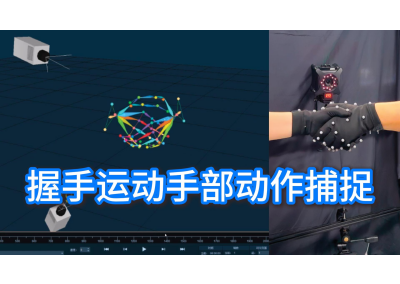
基于NOKOV度量系统的运动捕捉

实验环境
参考文献:
Yifeng Wang and Yi Zhao, Arbitrary Spatial Trajectory Reconstruction Based on a Single Inertial Sensor, IEEE Sensors Journal, vol. 23, no. 9, pp. 10009-10022, 2023, doi: 10.1109/JSEN.2023.3257867.
原文链接:
https://ieeexplore.ieee.org/document/10080916